Влияние модернизации компьютера и решений на моделирование автомобиля c симулятором со смешанной реальностью в Simulink
Влияние модернизации компьютера и решений на моделирование автомобиля c симулятором со смешанной реальностью в Simulink
Аннотация
Рассмотрено влияние быстродействия компьютера на моделирование автомобиля, предложено решение по реализации имитационного моделирования автомобиля на симуляторе с MR по обеспечению режима реального времени на основе предлагаемой блок-схемы и модернизации основного компьютера (увеличения частоты процессора, оперативной памяти и ее объема) в связи с недостаточным быстродействием существующих компьютеров среднего уровня.
Для исследования использовался метод компьютерного моделирования для решения 3 основных задач движения, колебаний и управляемости автомобиля численными методами на основе решателя ode5(DomandPrince) в пакете MathWorks (Simulink) при шаге 0,0004, 0,0006 в сочетании с разработанными программами на C/C++ в модуле S-Function Builder, а также для визуализации и звука, позволяющие реализовать процесс в режиме реального времени.
Установлено, что модернизация компьютера за счет увеличения оперативной памяти, производительности процессора и схемного решения с разделением задач по подпрограммам:
– увеличивает быстродействие в 1,82; 1,72; 1,5 раза по сравнению с AMD Rysen 5 2600, 6-ядерного, 3,4 Гц, ОП 16 Гб (2x8), 2666 МГц, обеспечивая с запасом необходимое быстродействие в Real Time (t=650 c);
– позволяет реализовать три основные задачи на одном компьютере (№ 2), сокращает необходимое число компьютеров с четырех до трех и исключает возможные проблемы при передаче информации на другие компьютеры, а высвободившийся компьютер (№ 3) можно использовать для других задач;
– имеющийся запас по быстродействию компьютера (№ 2) позволяет в ряде случаев загрузить в него некоторые задачи других подсистем автомобиля;
– передача информации через бинарный файл с (без) имитирования пространственных моделей обеспечивает наименьшее время моделирования, но требует дополнительного компьютера для визуализации дорожной обстановки и звука;
– передача информации на стенд по CAN BUS является с точки зрения минимизации числа компьютеров оптимальным вариантом для реализации 3 основных задач имитационного моделирования автомобиля на симуляторе со смешанной реальностью;
– для повышения быстродействия моделирования автомобиля в Simulink необходимо использовать на компьютере 32 Гб оперативной памяти с частотой >3200 МГц.
Предлагаемое решение позволяет значительно снизить затраты на компьютерную технику по сравнению с более мощными и дорогими компьютерами, дает возможность большему числу исследователей заниматься моделированием.
1. Введение
Сейчас при создании автомобиля наблюдается тенденция к большему использованию методов имитационного моделирования в сочетании со смешанной реальности (MR) и симулятора с водителем , , . Это направление открывает большие возможности для проработки дизайна, эргономики, конструкции автомобиля на электронных моделях, его моделированию и расчету, полунатурным стендовым испытаниям , , .
Данное направление позволяет учесть существенно влияющий фактор водителя, погрузив его в виртуальный мир эксплуатации , , , определить режим движения и нагруженность автомобиля и в итоге выйти на расчет реальной долговечности, топливной экономичности , . Для реализации этого требуется одновременное моделирование следующих задач:
– движения автомобиля с учетом совместного реального макро и микропрофиля дороги, характеристик двигателя, трансмиссии;
– колебаний автомобиля с учетом реальных характеристик подвески;
– управляемости;
– передачи данных вибраций и звука на стенд для вибрационного и звукового воздействия на водителя на симуляторе;
– имитирование и визуализация дорожной обстановки в шлеме виртуальной реальности.
И на базе получаемых данных следует решать остальные подсистемы автомобиля.
Данные задачи необходимо решать в Simulink (входит в MathWorks) в комбинации с Unreal Engine/Unity либо на основе предложенных подходов в работах , с созданием в нем программ на С/С++ для реализации макро и микропрофиля дороги, управления визуализацией дорожной обстановки, звуком, моделирования двигателя, трансмиссии, передачи информации на другие компьютеры. Важным моментом является задействование в этом процессе вибросимулятора, что требует реализации режима реального времени при моделировании и использовании больших ресурсов компьютерной техники.
Для получения приемлемой погрешности моделирования (10–15 %) требуется более корректное описание элементов подвески, трения, шин дифференциальными уравнениями (на основе интеграторов) , , и использования совместного реального макро и микропрофиля дороги. Однако усложнение сказывается на снижении быстродействия. Информация, как это решается за рубежом по трем основным задачам в сочетании с MR, вибростендом в интернете отсутствует. Основное внимание за рубежом в MR сконцентрировано на задачах эргономики, поведения, реакции водителя без задействования вибростенда с использованием игровых пакетов Unreal Engine, Unity , , , где имеется некоторая возможность упрощенного моделирования движения автомобиля , которая не годится для научных исследований. Так в пакетах невозможно задать профиль дороги, вибрации, плавно и программным путем регулировать скорость движения. Информация в этих работах в основном представлена в виде видеоматериалов.
Проблемным местом одновременного совместного моделирования этих задач в Real Time с задействованием вибростенда и водителя является недостаточное быстродействие существующих компьютеров среднего уровня (6-ядерных, 3,4–3,9 Гц при рекомендуемой MathWorks объеме оперативной памяти 16 Гб (2х8). Для реализации сложных моделей в полосе 0–28 Гц требуется обеспечение необходимого быстродействия при шаге 0,001– 0,0004 с. На снижении быстродействия (в 1,5 раза) также сказывается передача сигналов по сети CAN BUS на 6-DoF вибростенд. Необходимо учитывать, что большинство пользователей используют компьютеры среднего уровня стоимостью порядка 700 $ каждого, а не более мощные (5 Гц) и дорогие за 1800 $ и их требуется несколько. Последние обеспечивают повышение производительности всего на 10–20 %. Поэтому акцент сделан на модернизацию.
Эти выводы сделаны по результатам информации в интернете и предыдущих исследований , , , выполненных на компьютерах среднего уровня. В работе предложено повысить быстродействие за счет разделения вычислений по 3–4-м компьютерам через 3-уровневую комбинированную сеть и передачи информации на стенд с отдельного компьютера, включая разбивку математической модели на переднюю и заднюю подвеску в отдельных блок-схемах. Как оказалось, это все же недостаточно для пространственных моделей и автопоезда. Эти решения оптимальны для 2-, 3-осных плоских моделей. Идеальным решением могло быть распределение вычислений по ядрам процессора, но пока это не получается на Simulink R2024a.
Толчком для дальнейшего совершенствования послужило замеченное значительное повышение быстродействия моделирования до 2 раз в результате модернизации компьютера: использование процессора AMD Rysen 5 5600x (6-ядерного, 3,7–4,6 Гц), ОП DDR-4 Kingston Fury Beast 32 Гб (2x16), 3200 МГц. Это обусловило необходимость проведения исследований в этом направлении и пересмотра ранних решений.
Целью данной работы является рассмотрение оптимальных путей повышения быстродействия моделирования автомобиля на Simulink в режиме реального времени с задействованием симулятора и MR.
2. Методы и принципы исследования
Для исследования использовался метод компьютерного моделирования для решения 3 основных задач движения, колебаний и управляемости автомобиля численными методами на основе решателя ode5(DomandPrince) в пакете MathWorks (Simulink) при шаге 0,0004, 0,0006 с в сочетании с разработанными программами на C/C++ в модуле S-Function Builder, а также для визуализации и звука, позволяющие реализовать процесс в режиме реального времени.
2.1. Предлагаемые решения
Предлагаемое повышение быстродействия моделирования автомобиля в отличие от заключается в повышении возможностей компьютеров за счет повышения частоты процессоров, памяти и объемов последних при таком моделировании.
К компьютерам с MathWorks R2024 предъявляются следующие требования:
– Операционная система
Windows 11 (версии 22H2 или выше) либо Windows 10 (версии 22H2);
– Процессор
Минимум: Любой Intel или процессор AMD x86-64 с двумя или больше ядрами
Рекомендуется: Любой Intel или процессор AMD x86-64 с четырьмя или больше ядрами и поддержкой системы команд AVX2
Примечание: Будущий выпуск MATLAB потребует процессора с поддержкой системы команд AVX2.
– Оперативная память
Минимум: 8 ГБ.
Рекомендуется: 16 ГБ.
– Графика
Определенных требований в MatWorks R2024 по видеокарте пока не предъявляется (минимум 1 Гб памяти), наличие OpenGL 3.3, но в будущем потребуется мощная видеокарта т.к. планируется реализовать визуализацию движения автомобиля.
– Storage
4.2 GB for just MATLAB.
4-6 GB for a typical installation.
24 GB for an all products installation.
An SSD is strongly recommended.
Примечание. Неясно, как правильно трактовать перевод пункта Storage о 24 Гб, то ли это объем для размещения программ либо все же желательный объем оперативной памяти на компьютере.
При исследованиях , , , требования по 16 Гб памяти выполнялись.
В связи с выявленным значительным повышением быстродействия при модернизации компьютера дальнейший акцент сделан на возможность реализации 3 основных задач на одном модернизированном компьютере (рис. 1, computer № 2) в отличие от работы .
На схеме (рис. 1) на первом (мини-компьютер Raspberry) предлагается осуществлять считывание параметров с органов управления автомобиля и передача их через сеть Samba на второй компьютер, где реализуется моделирование движения, управляемости автомобиля, колебаний в трансмиссии. На третьем осуществляется визуализация дорожной обстановки, звуковое воздействие и как один из вариантов передача информации на 6-DoF платформу вибростенда по сети CAN BUS. Синхронизация процессов на третьем компьютере осуществляется по значению скорости движения со второго компьютера, информация с которого передается в виде бинарного файла на третий.
Для получения более корректных сравнительных результатов, исключающих человеческий фактор, исследование проводилось без задействования мини-компьютера Raspberry (№ 1) путем задания режима движения в блоке V_S2 (рис. 1) на Windows 10 64-битной версии 22H2, которая по информации в интернете на 20 % пока быстрее Windows 11 с использованием блок-схемы (рис. 2).
Имитирование усложнения модели (как пространственной) осуществлялось за счет добавления дополнительных блоков подпрограмм вибраций (рис. 3).
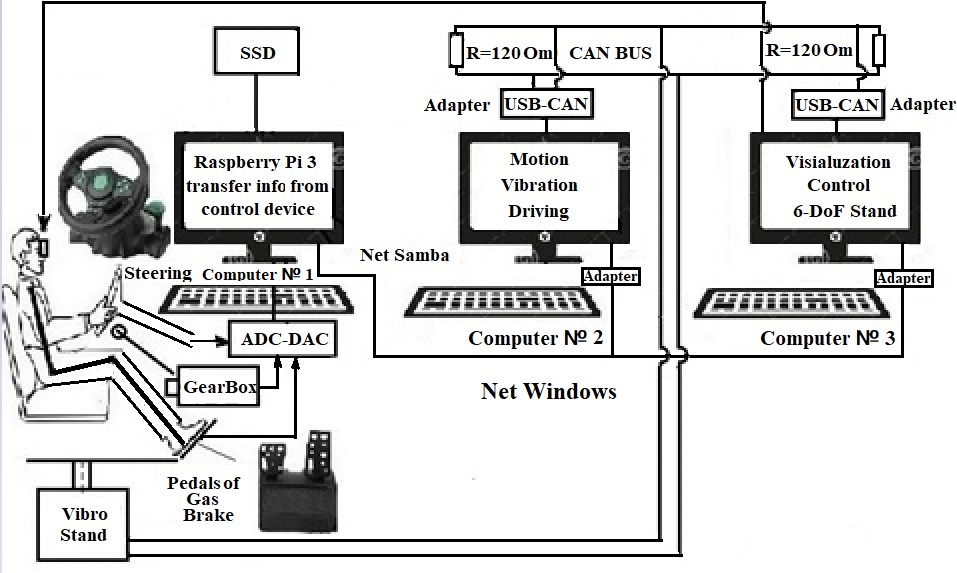
Рисунок 1 - Предлагаемая схема реализации моделирования автомобиля в режиме реального времени с вибростендом и смешанной реальностью
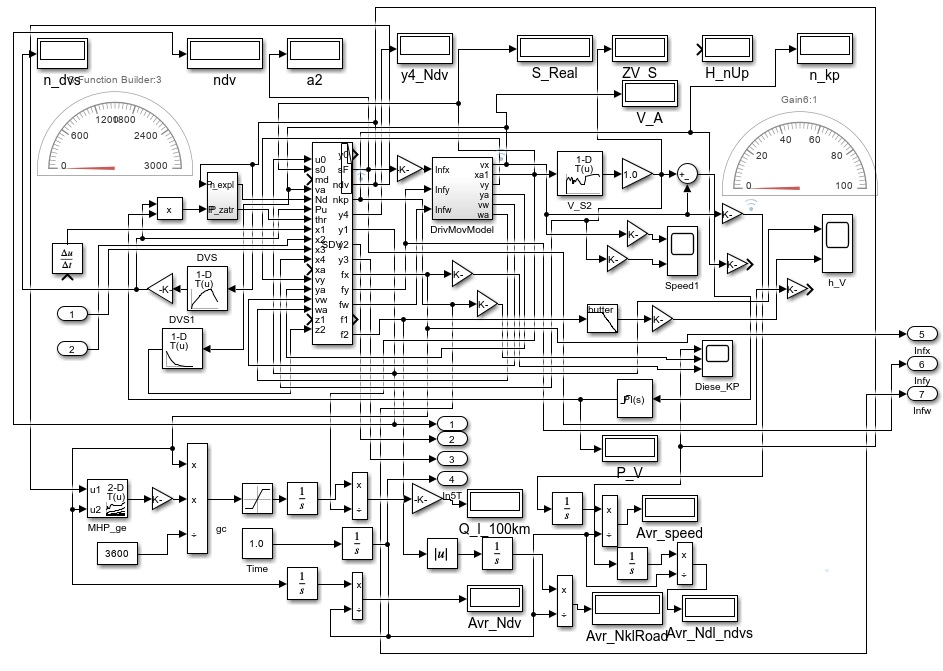
Рисунок 2 - Блок-схема реализации имитационного моделирования движения автомобиля в Simulink
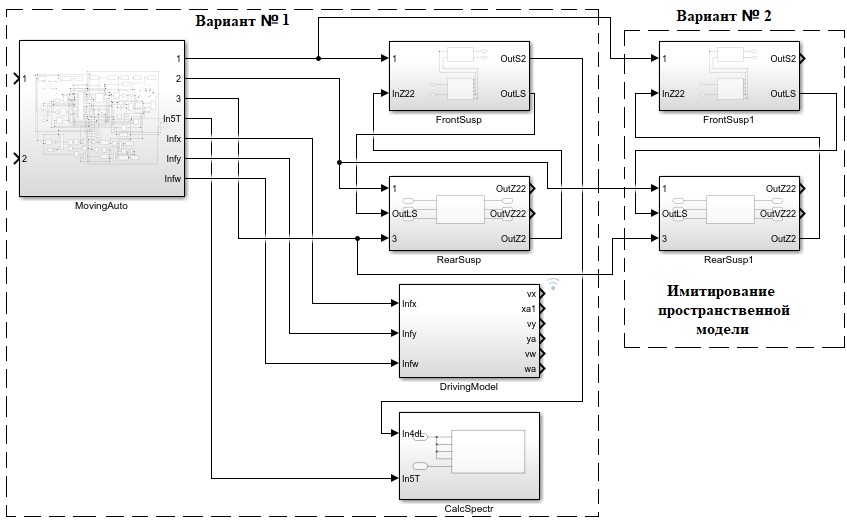
Рисунок 3 - Общая блок-схема реализации моделирования вибраций автомобиля в Simulink
– Вариант 1. Процессор Rysen AMD 5 2600, 6-ядерный, 3,4-3,9 Гц, MB ASUS Prime B450 Plus, видео карта Geforce RTX 730, 2 Гб, 700 МГц, ОП Patriot 16 Гб (2x8), 2666 МГц.
– Вариант 2. Процессор Rysen AMD 5 2600, 6-ядерный, 3,4-3,9 Гц, MB ASUS Prime B450 Plus, UEFI 4401, видео карта Geforce RTX 730, 2 Гб, 700 МГц, ОП Kingston Fury Beast 32 Гб (2x16), 3200 МГц.
– Вариант 3. Процессор Rysen AMD 5 5600X, 6-ядерный, 3,7–4,6 Гц, MB ASUS Prime B450 Plus, UEFI 4202, видеокарта Geforce RTX 3050, 8 Гб, 1580–1800 МГц, ОП DDR-4 Kingston Fury Beast 32 Гб (2x16), 3200 МГц.
2.2. Примененные модели автомобиля и реализация
Проверка предложенного решения на первом этапе проводилось на одном компьютере на плоских моделях автомобиля, описанных в работах , , , которые позволяют вести совместное моделирование движения, колебаний и управляемости.
Эти модели описываются 4–6 дифференциальными уравнениями второго порядка с учетом сложных моделей трения для реализации моделирования в полосе 0–28 Гц, включая трансмиссию, при шаге 0,0004–0,001 с в режиме реального времени.
Имитирование усложнения модели (как пространственной) на втором этапе осуществлялось за счет добавления дополнительных блоков подпрограмм вибраций (включающих 16 интеграторов, вариант № 3 на рис. 3).
3. Результаты исследования
В процессе исследования рассматривались два варианта передачи информации на стенд:
– вариант № 1 с использованием передаваемых данных (9 параметров: 6 сигналов 6DoF стенда, скорости движения, оборотов и мощности двигателя), записываемых в виде бинарного файла на накопитель .m2, 6 Мб/c (C:\\temp\\stnd.bt) для считывания их в последующем в компьютере № 3 для формирования в нем сигналов CAN BUS;
– вариант № 2 с использованием компьютера № 2 для формирования сигналов для 6DoF стенда, передаваемых с него по сети CAN BUS и обменом параметров визуализации и звука (скорости движения, оборотов и мощности двигателя) на основе бинарного файла.
На 1-м этапе использовался фиксированный шаг 0,0006 решателя ode5(DomandPrince).
В процессе моделирования по первому варианту подбирались значения счетчика, при котором происходит осуществление записи, чтобы обеспечить частоту 600 Гц (6×100 Гц). Исходили из того, что 10 значений квантования на частоте 10 Гц на электроактуаторе стенда достаточны для воспроизведения вибрационного воздействия на водителя . После 12 Гц на электроактуторах наблюдается завал характеристики и дальнейшее увеличение квантования нецелесообразно.
В варианте № 2 использовался фиксированный шаг 0,0004 c решателя ode5(DomandPrince) для приведения в соответствие времени моделирования, Real Time и визуализации дорожной обстановки, реализуемой с помощью новой разработанной программы ShowRD.exe, запускаемой на компьютере № 2 параллельно с программой звука.
Результаты исследований приведены в таблице.
Таблица 1 - Затраты времени на моделирование при различных вариантах
Вариант моделирования | Время в с, вариант компьютера | ||
Вариант № 1 | Вариант № 2 | Вариант № 3 | |
1. Передача информации через бинарный файл без имитирования пространственных моделей | 547 | 540 | 300 |
2.1. Передача информации через бинарный файл с имитированием пространственных моделей | 600 | 545 | 328 |
2.2. Передача информации по CAN BUS с имитированием пространственных моделей | 898 | 653 | 599 |
Примечание: в варианте 2.2 (Компьютер № 2) использован шаг 0,0004 с для реализации продольных и поперечных вибраций, вызываемых колебаниями в трансмиссии; реальное время моделирования составляет 470 с
Как видно из таблицы, использование модернизированного компьютера:
– увеличивает быстродействие в 1,82; 1.72; 1,5 раза, обеспечивая с запасом необходимое быстродействие в Real Time (t=650 c);
– позволяет реализовать три основные задачи на одном компьютере (№ 2), сокращает необходимое число компьютеров с четырех до трех, исключает возможные проблемы при передаче информации на другие компьютеры, а высвободившийся компьютер (№ 3) можно использовать для других задач;
– имеющийся запас по быстродействию позволяет загрузить в него (№ 2) некоторые задачи других подсистем автомобиля;
– передача информации через бинарный файл с (без) имитирования пространственных моделей обеспечивает наименьшее время моделирования, но требует дополнительного компьютера (№ 3) для визуализации дорожной обстановки и звука;
– CAN BUS является с точки зрения минимизации числа компьютеров оптимальным вариантом для реализации 3 основных задач.
Предложенное решение позволяет значительно снизить затраты на компьютерную технику по сравнению с более мощными и дорогими компьютерами, дает возможность большему числу исследователей на более слабой технике заниматься моделированием.
Даже в варианте № 1 при слабом компьютере по предлагаемому схемному решению возможна реализация Real Time при использовании передачи информации через бинарный файл с имитированием пространственных моделей. Но этот вариант потребует использования еще одного компьютера (№ 3) для реализации визуализации дорожной обстановки, звука двигателя, шума движения автомобиля.
Полученные данные на основе предложенного решения по использованию измененной блок-схемы, увеличения объема памяти и производительности процессора позволяют оптимальным способом с минимальными затратами (до 200 $) реализовать на одном компьютере (№ 2) три основные задачи моделирования, а высвободившийся компьютер (№ 3) использовать для других задач
Предположительно в повышении быстродействия основную роль сыграло увеличение объема оперативной памяти и оптимальное сочетание соответствия параметров контроллера памяти в самом процессоре с оперативной памятью поскольку повышение быстродействия процессора обычно пропорционально увеличению его частоты. Это обусловлено особенностями архитектуры процессоров AMDRysen 5. При использовании памяти PatriotViper 32 Гб 3600 МГц компьютер на данной материнской плате не стартует. Если исходить, что для Windows10 требуется 6 Гб памяти, а для MathWorks16 Гб получается в сумме 22 Гб, это объясняет такое влияние 32 Гб ОП по сравнению с 16 Гб. Отсюда следует, что для повышения быстродействия моделирования в Simulink необходимо использовать на компьютере 32 Гб оперативной памяти с частотой >3200 МГц.
4. Заключение
1. Выявлено влияние модернизации компьютера, предложено решение по реализации имитационного моделирования автомобиля на симуляторе с MR по обеспечению режима реального времени на основе предлагаемой блок-схемы и модернизации основного компьютера на базе процессора AMD Rysen 5 5600X, 6-ядерного, 3,7-4,6 Гц, MB ASUS Prime B450 Plus, UEFI 4202, видеокарта Geforce RTX 3050, 8 Гб, 1500–1800 МГц, ОП DDR-4 Kingston Fury Beast 32 Гб (2x16), 3200 МГц.
2. Установлено, что модернизация компьютера за счет увеличения оперативной памяти, производительности процессора и схемного решения:
– увеличивает быстродействие в 1,82; 1,72; 1,5 раза по сравнению с AMD Rysen 5 2600, 6-ядерного, 3,4 Гц, ОП 16 Гб (2x8), 2666 МГц, обеспечивая с запасом необходимое быстродействие в Real Time (t=650 c);
– позволяет реализовать три основные задачи на одном компьютере (№ 2), сокращает необходимое число компьютеров с четырех до трех и исключает возможные проблемы при передаче информации на другие компьютеры, а высвободившийся компьютер (№ 3) можно использовать для других задач;
– имеющийся запас по быстродействию компьютера (№ 2) позволяет в ряде случаев загрузить в него некоторые задачи других подсистем автомобиля.
– передача информации через бинарный файл с (без) имитирования пространственных моделей обеспечивает наименьшее время моделирования, но требует дополнительного компьютера для визуализации дорожной обстановки и звука;
– передача информации на стенд по CAN BUS является с точки зрения минимизации числа компьютеров оптимальным вариантом для реализации 3 основных задач имитационного моделирования автомобиля на симуляторе со смешанной реальностью;
– для повышения быстродействия моделирования автомобиля в Simulink необходимо использовать на компьютере 32 Гб оперативной памяти с частотой >3200 МГц.
3. Предлагаемое решение позволяет значительно снизить затраты на компьютерную технику по сравнению с более мощными и дорогими компьютерами, дает возможность большему числу исследователей заниматься моделированием.