On the Selection of Models, Means for a Mixed Reality Vehicle Simulator
On the Selection of Models, Means for a Mixed Reality Vehicle Simulator

Abstract
The packages used for MR, motion, vibration and handling models, and their requirements for using mixed reality in vehicle simulation are analysed.
Creation of visualization of simulation environment in Unity, Unreal Engine packages and on the basis of video recorded on the road with its subsequent playback in accordance with variable speed of movement on the basis of the developed program of controlled video, implementation of engine sound in simulation is examined.
It is shown that in the future it seems more perspective to use Unreal Engine for modelling various road situations and working out ergonomics.
The implementation of a vibration test bench based on a 6-DoF platform using MOOG or Parker electric actuators is studied. By means of modelling, the necessary parameters are determined and models of these actuators are selected.
The necessity of separating the calculations on computers and using Samba network, CAN BUS for information exchange is determined, the scheme and block diagram of implementation on Simulink are proposed.
1. Введение
Сейчас за рубежом уделяется большое внимание использованию смешанной реальности (MR) для ускорения создания автомобиля на основе методов полунатурного имитационного моделирования , , , , , являющегося их Know How. Смешанная реальность представляет собой компьютерную технологию погружения человека в искусственный/моделируемый мир, где он управляет виртуальным объектом в данном случае автомобилем, движущимся по дороге, ведет проработку эргономики, обслуживание, ремонт машины. Она позволяет заменить многие физические модели фотореалистической смешанной действительностью. Это достигается путем использования специального шлема с очками (мониторами), ПО, звукового воздействия, «искусственной» руки, вибростенда и моделирования автомобиля. Использование смешанной реальности обусловлено необходимостью учета человеческого фактора, существенно влияющего на режим движения автомобиля, нагруженность его узлов и снижения затрат на симуляторы и исследования автомобиля , . Более интенсивно работы в автомобилестроении по смешанной реальности, как средства визуализации, начались с 2016 г. с появлением шлемов виртуальной реальности 4К и пакетов Unity и Unreal Engine, предназначенных изначально для создания игр, мультимедиа, киноиндустрии. В основном ведущие автомобильные фирмы для исследовательских целей MR больше используют пакет Unreal Engine (UE) . Примерами UE являются игра Euro Truck Simulator, рекламные материалы BMW и других фирм , , (рис. 1). Unity больше применяется для VR и AR (Audi, BMW, БелАЗ, ОИМ НАН РБ и др.). Это зависит от задач. Для создания VR/AR также используется Vuforia в сочетании с Creo, Unity . Пакет UE ориентирован на использование языка C/C++, а Unity на C#. На освоение пакетов с языками программирования требуется до 2-х лет.
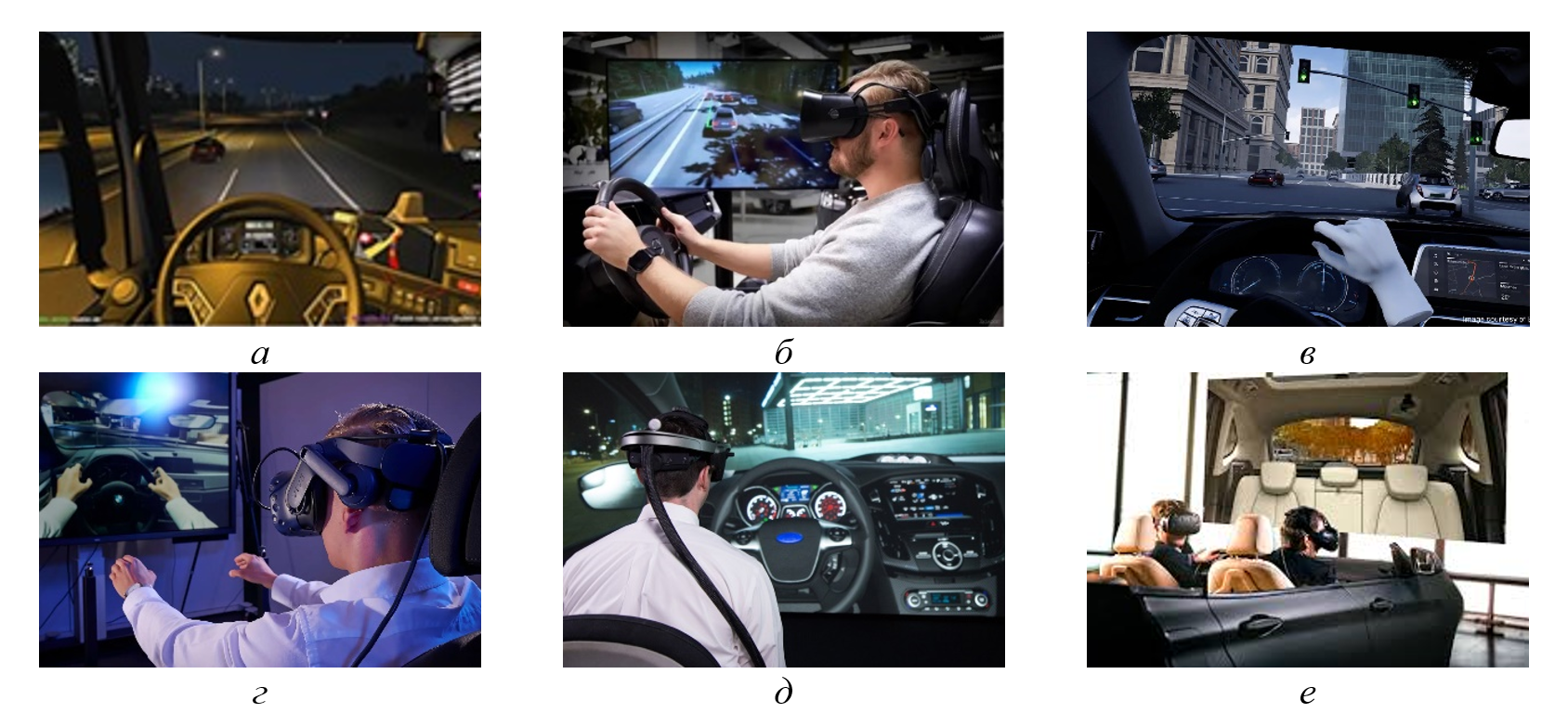
Использование смешанной реальности в Unreal Engine в игре Euro Truck Simulator (а) и фирмами BMW (б, в, г), Ford (д), Mercedes Benz (е)
Для исследовательских целей больше используются шлемы HTC Vive Pro со станциями позиционирования и трекерами. У шлемов Meta Oculus Quest последних нет.
Сейчас задачи смешанной реальности значительно расширились. Они включают помимо рекламных, дилеровских задач, дизайна (на что больше сконцентрировано внимание) еще и моделирование движения, колебаний и управляемости автомобиля, проработку его эргономики, определение режима движения, нагрузок на его узлы, использование полученных данных при расчетах и стендовых испытаниях. Необходима комплексная реализация всего этого.
Целью данной работы является рассмотрение выбора моделей, программных и технических средств для создания симулятора с использованием смешанной реальности.
Необходимость такой работы обусловлена отсутствием серьезных публикаций по этому направлению в MR. В основном информация по MR в интернете носит общий, поверхностный характер, нет ни моделей, схем, решений указанных выше задач.
Рассмотренные ниже решения базируются на исследованиях автора по имитационному моделированию автомобиля, включая MR в Simulink в режиме реального времени , , тестировании новых программных продуктов и анализе решений и тенденций за рубежом.
2. Основные факторы, влияющие на выбор средств для смешанной реальности
2.1. Использование пакета моделирования
Ключевым моментом при выборе пакета является обеспечение высокого быстродействия, необходимого функционала и удобство программирования. Для моделирования движения, колебания и управляемости автомобиля в режиме реального времени наиболее подходит использование пакета Matlab/Simulink версий R2015b, R2023 с S-Function Builder, как наиболее быстродействующих и имеющих возможность создания встроенной программы на языке С и массивов данных , . У версий R2016, R2018 быстродействие в 2 раза хуже из-за неоптимизированности. Пакет MSC.ADAMS не подходит для этих задач: нет возможностей создания встроенной программы, реализовать сложные зависимости трения, хранения больших массивов макро и микропрофиля дороги, обмена информации между устройствами и компьютерами.
В отношении SiminTech , созданного на медленном Pascal/Delphi в 2015 г. в МВТУ, которого некоторые прочат в приемники MathWorks сомнения: может ли он при объеме 579 Мб инсталляции против 12 Gb у R2023 потянуть систему из 20-ти и более интеграторов, обеспечить быстродействие и функционал на уровне Matlab/Simulink, возможность создания многовекторных таблиц, большого массива (384000 байт и более) для хранения макро и микропрофиля дороги в оперативной памяти, глобальных переменных в программе на Си (DLL), распараллелить вычисления по ядрам процессора, что важно для реализации моделирования в режиме реального времени, исключить неизбежные ошибки при ручном задании входных и выходных параметров на C. Для небольших и определенных задач и обучения в ВУЗах может он и подходит.
Из-за отсутствия SiminTech сделать окончательные выводы по нему пока не представляется возможным. В связи с чем в работе рассматривается Matlab/Simulink.
2.2. Модели автомобиля
При выборе моделей для совместного моделирования численными методами (8–12 порядка) в Simulink в режиме реального времени движения, колебания (в полосе 0-25 Гц,шаг 0,001 с) и управляемости автомобиля вынуждены исходить из ограниченных возможностей существующих пакетов и компьютеров с процессорами 4–5 ГГц. На них могут быть реализованы только системы с плоскими моделями (рис. 2) с использованием сложных моделей трения с приемлемой сходимостью 10–15% , .
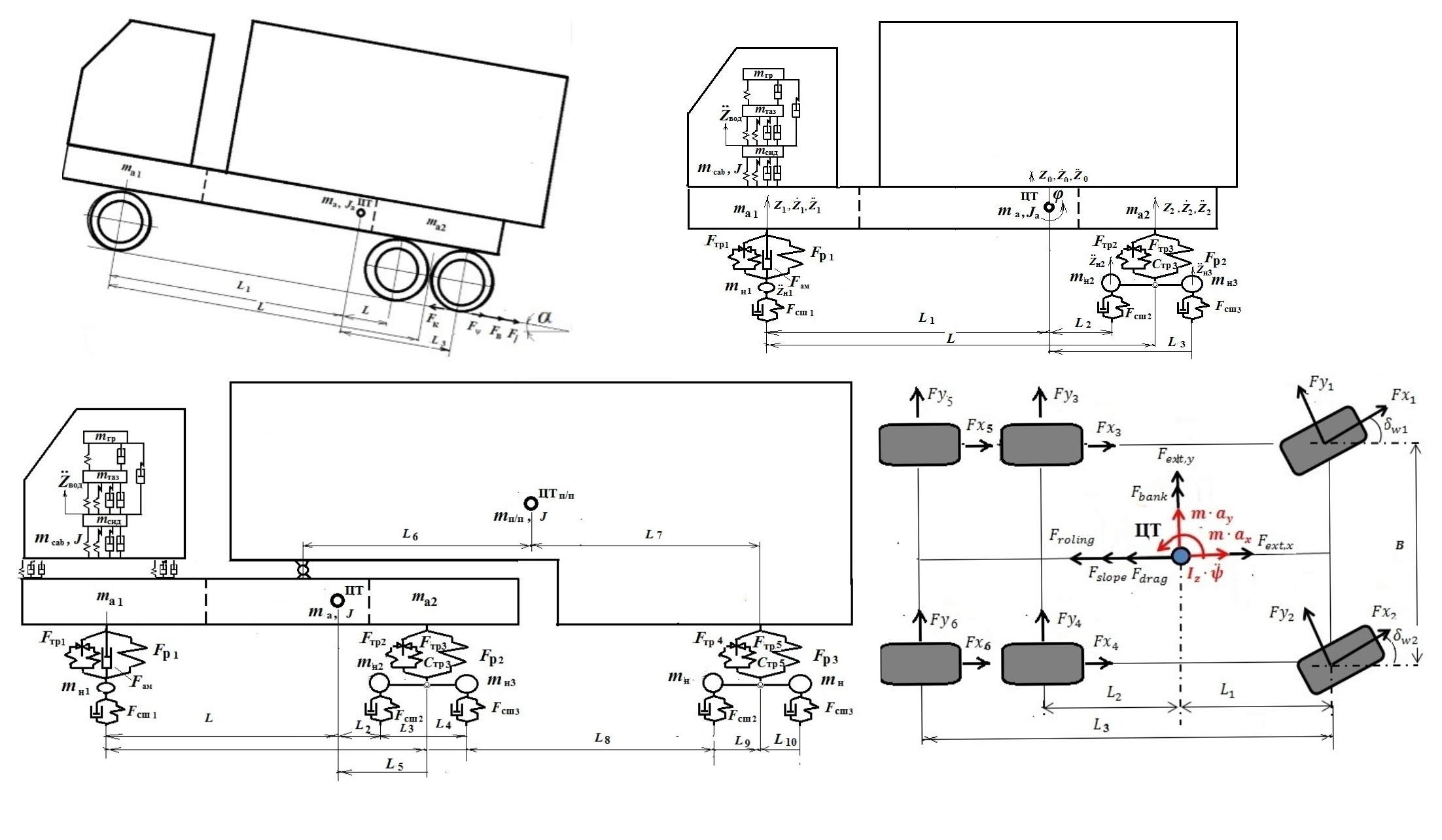
Плоские модели, используемые при моделировании на симуляторе
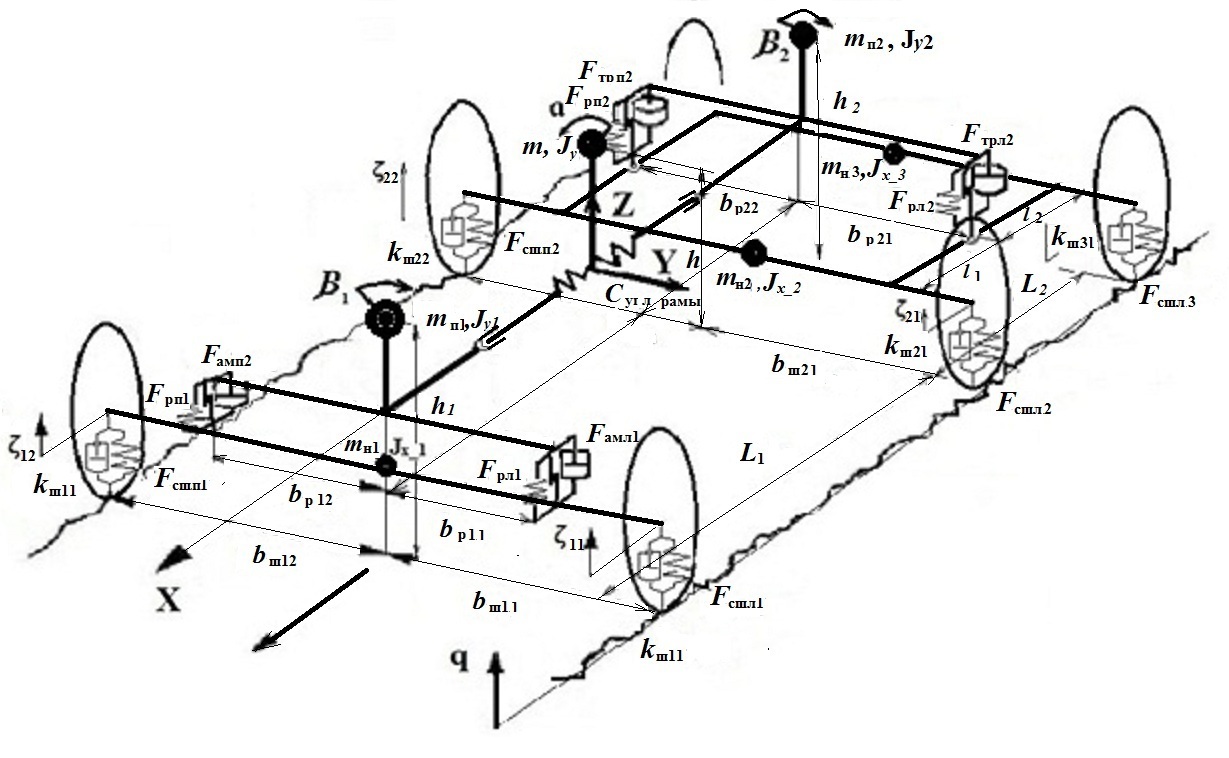
Пространственная модель 6×6, используемая при моделировании на симуляторе
2.3. Использование реального макро и микропрофиля дороги
Для получения корректных результатов при моделировании важно использование реального макро и микропрофиля дороги в виде совместного массива данных, заданного по точкам с шагом 0,1–0,15 м, размещенного в оперативной памяти модуля S-Function Builder в Simulink (96000 точек пути, 12500 м дороги) с интерполяцией промежуточных точек по методу Catmull-Rom, с возможностью дополнительной подкачки и вести моделирование с переменной скоростью движения, как это сделано автором в работах , .
2.4. Использование корректных характеристик элементов подвески, трансмиссии
Важным является использование более корректных характеристик элементов подвески, трансмиссии и их моделей , , обеспечивающих погрешность не более 10–15 % с учетом спектра возмущения реальной дороги, чтобы затраты оправдывали его. Для чего требуется описывать трение дифференциальной зависимостью следующего вида.
где cр.ст, – жесткость рессоры в статике;
cр.дин1, cр.дин2 – жесткость рессоры при блокировке подвески;
Fтр, Fтр2, – величина усилия при трении 1, 2,
Fр1max, Fр2max – максимальная величина трения 1, 2;
kв.тр – коэффициент «вязкого» трения;
Fам – максимальная величина «вязкого» трения.
Применение модели «вязкого» трения и упругой характеристики рессоры в виде простой зависимости Fр = f (Δl) приводит к погрешности 30–50%, а линейных до 200%.
Для смешанной реальности требуются 3D модели внутренней передней части кабины, руля, которые должны накладываться с помощью приложения MR на изображение дорожной обстановки в шлеме.
2.5. Разнесение вычислений на компьютеры
Необходимость разнесения вычислений на компьютеры обусловлено тем, что существующие компьютеры сейчас достигли своего потолка производительности 5/6 ГГц и требуется компенсировать потери производительности из-за передачи информации на стенды по сети CAN BUS. Использование оперативной памяти DDR5 (>6000 МГц), жидкостного охлаждения процессоров с разгоном их до 5 ГГц позволяет повысить производительность новых компьютеров всего на 20–25%.
Поэтому более лучшим решением является разнесения вычислений по подсистемам и реализации визуализации на отдельные компьютеры, чтобы реализовать режим реального времени и охватить разные подсистемы, А для обмена данными между ними использовать сеть CAN BUS (как наиболее быстродействующую), позволяющую адресно направлять и обмениваться информацией, а для обмена с Raspberry использовать сеть Samba. Тем более, что уже имеются адаптеры с частотой до 10 Мбит/с, а также можно использовать предложенный в этой работе и метод сжатия информации, повышающий производительности CAN BUS в два раза.
Возможен вариант использования двух компьютеров с твердотельными накопителями .M2 (>6000 МГц), объединенных быстродействующей сетью (X4 DDR (20Gb/s) и обменом в ней бинарными файлами подсистем.
2.6. Создание визуализации имитационной обстановки и звука

Использование фирмами BMW (а), Volvo (б, в) смешанной реальности
В пакетах Unity и Unreal Engine упрощенно реализуется имитация перемещения через визуализацию обстановки. В пакете Unreal Engine можно задать внешнюю характеристику двигателя, однако при этом не учитывается трансмиссия поскольку он ориентирован на игры. Чтобы подключить органы управления требуется написать программы на C# или C/C++ с задействованием датчиков, АЦП.
Volvo в сотрудничестве с финской фирмой Varjo создала недвижущийся симулятор вождения (рис. 4б, the ultimate driving simulator) на базе игрового движка Unity, шлема дополненной/смешанной реальности Varjo XR-3 и британского тактильного костюма Teslasuit с обратной связью , . С помощью пакета Unity создается 3D-мир дорожной обстановки с наложением в очках Varjo и его ПО изображения внутреннего вида салона и внешней обстановки, что создает приближенное ощущение реального вождения машины. Это позволяет смоделировать различные дорожные ситуации: внезапного появление пешехода или животного на дороге, торможения впереди идущей машины, резкий объезд препятствий, обгоны, движение по дороге. Судя по видео, Varjo также использует совмещение записанного видео в дороге с изображением, смоделированным с помощью Unity без моделирования колебаний автомобиля. Varjo для более полного ощущения при проработке эргономики создает для имитатора стенда физический макет рулевого колеса с помощью 3D принтеров .
БелАЗ, единственный из заводов СНГ, использует виртуальную, дополненную и смешанную реальность с помощью Unity, Meta Oculus Quest и 3D max в своих разработках. Имеет симулятор: стенд с мониторами для обучения водителей навыкам управления карьерными самосвалами, созданный с использованием смешанной реальности. Но он не подходит для исследовательских целей из-за недостаточного быстродействия имитатора перемещений и невозможности интегрировать его с Simulink.
По субъективной оценке автора, сидевшего на простых симуляторах, включая игровые с низкой скоростью перемещения 0,3–0,5 м/с, они не дают реального ощущения движения и колебаний. Это же можно сказать о симуляторах MR ведущих автомобильных фирм, в которых нет движения и колебаний.
Следует отметить, что в упомянутых пакетах MR нет возможности задания продольного и микропрофиля дороги и синхронизации их с дорожной обстановкой, что необходимо для комплексного моделирования автомобиля.
Важным моментом является выбор одного языка программирования: C# либо C/C++. Лучше ориентироваться на C/C++ и Unreal Engine. Последний мощнее чем Unity. C/C++ используется в системе: в АЦП, микроконтроллерах, миникомпьютерах и в S-Function Builder, SiminTech (DLL). И по быстродействию программы на C/C++ в два раза быстрее чем C#, что важно для Real-Time, учитывая, что компьютеры и пакеты и так работают на пределе своих возможностей.
Другим вариантом визуализации дорожной обстановки является предложенный автором способ записи видео дорожной обстановки при постоянной скорости движения автомобиля по дороге с последующим воспроизведение этого видео с помощью разработанных программ на компьютере и шлеме пропорционально скорости движения при моделировании в Simulink . Данный вариант гораздо проще и менее затратный. Но все же в дальнейшем представляется более перспективным использование Unreal Engine для моделирования различных дорожных ситуаций, отработки эргономики.
Для имитирования звука предложено использование блоков записей коротких файлов звука двигателя при фиксированных оборотах на реальном автомобиле, которые воспроизводятся в разработанной программе на C/C++ в зависимости оборотов и мощности двигателя. Управляющая информация для программы, реализующей звучания двигателя, берется из бинарного файла обмена S-function Builder Simulink.
3. Создание стенда

Конструкция игрового японского стенда, подходящая для MR
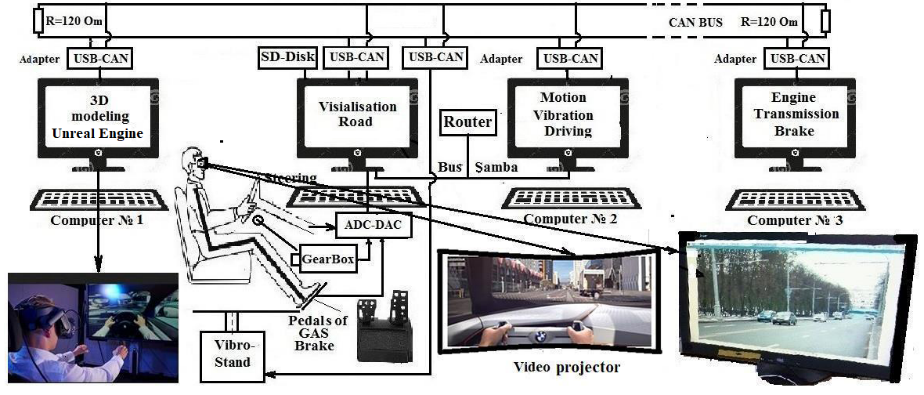
Схема реализации моделирования со смешанной реальностью
Проведенным выше моделированием движения и колебаний на 3-х компьютерах с имитацией обмена по сети CAN BUS по схеме рис. 6 установлено, что электроактуаторы должны обеспечивать скорость перемещения 1,3–1,5 м/с . Этим требованиям отвечают модели актуаторов MOOG MB-EP-6DOF/24 (24000 Н) или Parker ETH080 M10 (25100 Н). Скорость более дешевых китайских актуаторов и их стендов (0,3–0,7 м/с) недостаточна . В варианте без вибрационного воздействия могут использоваться предлагаемые на Alliexpres.com готовые элементы простейшего стенда: сиденье, руль, педали, селектор КПП.
Важным моментом предлагаемого схемного решения моделирования в MR является необходимость разнесение вычислений на компьютеры, чтобы реализовать режим реального времени и охватить разные подсистемы. А с помощью миникомпьютера Raspberry и АЦП осуществлять снятие информации с органов управления и передачу ее по сети Samba на компьютеры (рис. 6).
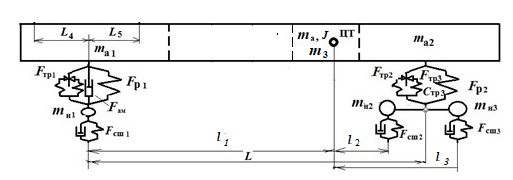
Модель раздельного подрессоривания автомобиля
где p, mа – радиус момента инерции подрессоренной массы автомобиля,
l1, l2 – расстояние от центра тяжести, L – база автомобиля;
Это позволяет разнести вычисления по ядрам процессора частей подрессоренных масс и тем самым повысить быстродействие.
4. Блок-схема реализация смешанной реальности в Simulink
Для реализации смешанной реальности предлагается следующая блок-схема моделирования движения, колебаний и управляемости автомобиля приведенная на рис. 8 с визуализацией и звуком на основе управляемого сигнала по скорости движения.
В предлагаемой системе задействуется рабочее место водителя с использованием датчиков педалей газа, управления КПП (селекторного переключателя), поворота руля на основе потенциометров, с которых снимается электрический сигнал и подается через АЦП в Raspberry 3/4, а из него записывается в файл обмена с Simulink и эти данные используются в процессе моделирования.
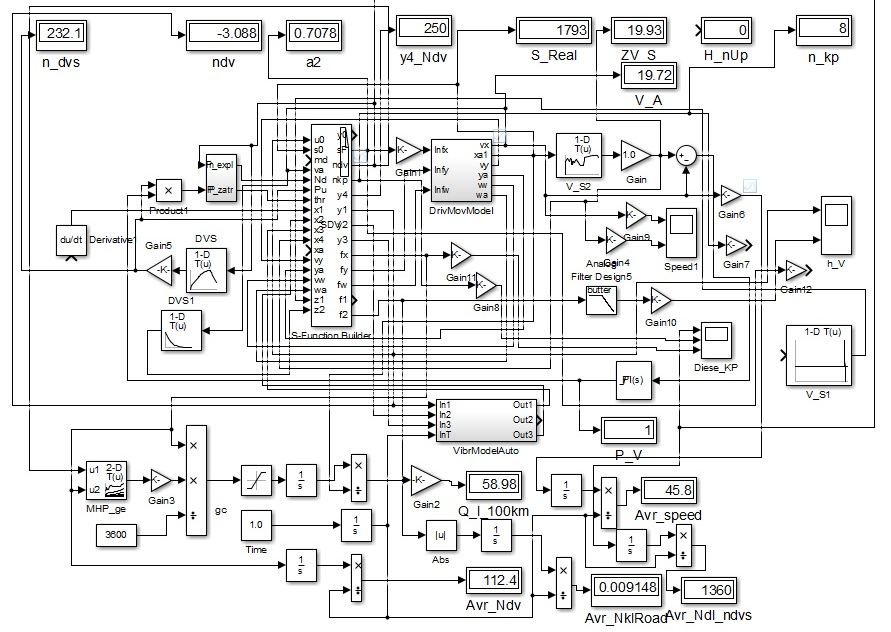
Блок-схема реализации имитационного моделирования с MR в Simulink
5. О выборе технических средств
В связи необходимости реализации режима реального времени требуется использование высокопроизводительных компьютеров поскольку при использовании CAN BUS происходит снижение производительности системы в 1,5 раза .
Исходя из этого предлагается следующая конфигурация технических средств: – процессор серии Ryzen 7000 (7950X/7600X (5,7/4,7 ГГц), обеспечивающий более высокую производительность в играх в Unreal Engine на 35-53% чем у Intel Core i9-12900K (5,2/3,2 ГГц), материнская плата ASUS ROG Strix X670E-E Gaming WiFi либо ASRock X670E Taichi, 32/64 Гбайт памяти DDR5 G.Skill, водоблок EK-Quantum Velocity2 AM5.
Другим вариантом является использование процессоров Intel Core i9-14900К (6/4,4 ГГц) с соответствующими им платами, которые сейчас появятся на рынке.
В качестве очков AR/MR реальности рекомендуется HTC Vivo Pro 2/3 со станциями позиционирования и трекерами c созданием приложений по отслеживанию движения рук в VIVEPORT SDK 1.7.20 (на C/C++).
При использовании AR/MR на компьютерах в связи возросшими параметрами шлемов по video (> 5К на глаз) требуется использование более производительной видеокарты не ниже GIGABYTE NVIDIA GeForce RTX 3080 10-16 ГБ либо Intel Arc A770.
6. Заключение
1. На основе исследований автора и анализа применяемых пакетов для MR, моделей движения, колебаний и управляемости, определены требования к ним при использовании смешанной реальности при моделировании автомобиля. Наиболее оптимальным вариантом является моделирование в Simulink c S-Function Builder с организацией сети с помощью Samba и CAN BUS и задействованием вибростенда на основе 6-DoF платформы на электроактуаторах MOOG или Parker. Путем моделирования определены необходимые параметры: по перемещениям, скорости и подобраны модели этих актуаторов. Предложены схемные решения и блок-схемы реализации симуляторов с MR.
2. Рассмотрено создание визуализации имитационной обстановки в пакетах Unity, Unreal Engine и использование более простого метода визуализации дорожной обстановки на основе записанного в дороге видео, которое воспроизводится в шлеме виртуальной реальности в соответствии со скоростью моделирования автомобиля в пакете Simulink с помощью разработанной программы управляемого видео по скорости движения. Отмечена сложность освоения Unreal Engine, Unity, отсутствие в них возможности осуществления вибрационного воздействия, задания продольного и микропрофиля дороги и синхронизации их с дорожной обстановкой, что необходимо для комплексного моделирования автомобиля.
4. И все же более перспективным в дальнейшем представляется использование Unreal Engine c программами на C/C++ в сочетании с Simulink для моделирования различных дорожных ситуаций, отработки эргономики с применением отработанных решений по моделированию движения, колебаний и управляемости автомобиля.
5. Обоснована необходимость разнесения вычислений на компьютеры и использование сети Samba, CAN BUS для обмена информации, предложена схема и блок-схема реализации на Simulink. Предложено с помощью миникомпьютера Raspberry, АЦП и программы на C/C++ осуществлять снятие информации с органов управления и передачу ее по сети Samba на компьютеры.