The travelling salesman problem with turn penalties: the three-vertex placement problem and algorithmic solution schemes
The travelling salesman problem with turn penalties: the three-vertex placement problem and algorithmic solution schemes

Abstract
The article examines the classic travelling salesman problem (TSP) and its variant for routing on graphs with turn penalties, where the cost of a route depends not only on the selected edges but also on the sequence of two adjacent transitions (triplets of vertices). This problem is formalised via a second-order cost function and corresponds to the quadratic travelling salesman problem (QTSP) and the angular travelling salesman problem (angular TSP). A theoretical overview of results on complexity, approximations and the most efficient algorithmic approaches to the TSP is presented. Two complementary solution schemes for the turn-cost model are proposed: an exact MILP formulation with linearisation of triple transitions and standard sub-tour constraints for small and medium-sized graphs, as well as a scalable heuristic scheme for large graphs, based on candidate edge pruning, a k-opt-type local search, and incremental recalculation of the turn component of the objective function. The computational limitations of the models, an evaluation of the growth in the number of triples taken into account during pruning, and the scope of applicability of the approaches for practical routing problems are discussed.
1. Введение
1.1. Актуальность и контекст
Задача коммивояжёра (TSP) является базовой моделью комбинаторной оптимизации и используется как эталон при развитии точных и эвристических методов решения NP-трудных задач. Современные обзоры подчёркивают, что даже при наличии сильных теоретических результатов (классические динамические схемы, аппроксимационные гарантии для метрических случаев, развитые MILP/branch-and-cut подходы) практическое масштабирование на сотни тысяч и миллионы узлов требует локального поиска, разрежения соседств и вычислительной инженерии.
В транспортных и навигационных приложениях стоимость движения часто зависит не только от ребра (j,k), но и от предыдущего шага (i,j): повороты создают задержки на перекрёстках, ограничения по радиусу и дополнительные риски манёвра. Это приводит к модели второго порядка, где вклад определяется тройками i→j→k, и требует корректной постановки и алгоритмической адаптации локального поиска, особенно при больших n.
1.2. Цель и вклад
Цель: формализовать TSP с поворотными штрафами и предложить вычислительно реализуемый метод решения, согласованный с масштабированием.
Основной вклад:
1. Модель Turn-TSP со стоимостью по тройкам и нормализацией поворотного штрафа (для интерпретируемости λ).
2. MILP-постановка с линеаризацией троек (для малых n/эталонных оценок).
3. Turn-aware эвристика: жадная инициализация второго порядка + локальный поиск 2-opt/k-opt по F с кандидатным разрежением и локальным пересчётом ΔF; монотонность обеспечивается правилом принятия ΔF<0.
4. Минимальная экспериментальная валидация на Rand2D и Grid инстансах, демонстрирующая эффект при λ>0.
2. Методы и принципы исследования
2.1. Постановка задачи: стоимость по тройкам и нормализация
Пусть задано множество вершин V={1,…,n} и базовые стоимости переходов djk≥0 (например, евклидово расстояние). Введём штраф поворота
Ищется гамильтонов цикл τ=(v1, …,vn, v1), минимизирующий
где индексы по модулю n, λ≥0 — вес важности поворотов,
Замечание 1 (Зачем нужна нормализация). Без нормализации масштаб P может доминировать или исчезать относительно D в зависимости от инстанса. Для углового штрафа удобно задавать
где θ — угол поворота в вершине j. Тогда λ становится сопоставимым между инстансами.
2.2. Пример: «стоимость поворота» через угол
Пусть вершинам соответствуют координаты
и положим
2.3. Точная MILP-модель (для малых n и эталонных оценок)
Введём бинарные переменные
Цель:
Ограничения «один вход/один выход»:
Линеаризация троек:
для всех допустимых i, j, k. Подтуры исключаются стандартными для TSP средствами (MTZ или плоскости отсечения); детальное обсуждение современных точных/аппроксимационных подходов и условий применимости приведено в обзорах.
Замечание 2. MILP с тройками имеет O(n3) переменных zijk в полном виде, поэтому применяется на малых n или при разрежении множества троек.
2.4. Эвристический метод: разрежение + второй порядок + turn-aware 2-opt
Метод ориентирован на масштабирование и опирается на ключевые принципы современных TSP-эвристик: локальный поиск, разрежение соседств и вычислительная эффективность.
2.4.1. Кандидатные множества (ограничение степени)
Для каждой вершины j строится список Cand(j) из K ближайших соседей по djk (обычно K∈[8,15], в частности K≤10 как практический компромисс). Далее при локальном поиске рассматриваются перестройки, использующие рёбра преимущественно из Cand(⋅), что уменьшает число проверяемых вариантов.
2.4.2. Начальное решение второго порядка
Начальный тур строится жадно по критерию второго порядка. При текущем конце тура (vt-1, vt) следующая вершина k выбирается как
Тем самым поворотный штраф учитывается уже на этапе построения.
2.4.3. Как модифицируется 2-opt под второй порядок: локальный ΔF
В классическом 2-opt выбираются две дуги (a, b) и (c, d) в текущем туре и выполняется перестройка, приводящая к замене на (a, c) и (b, d) (с разворотом промежуточного сегмента). Для цели первого порядка пересчитывается только вклад четырёх рёбер. Для цели второго порядка меняются также штрафы для троек около точек разрыва/склейки.
Ключевое наблюдение: 2-opt влияет на ограниченное число локальных троек возле вершин {a,b,c,d} (и их соседей по туру). Поэтому ΔF=ΔD+λΔP можно вычислять локально, без пересчёта всего F(τ), что критично по скорости.
Утверждение 1 (Монотонность). Если 2-opt/k-opt перестройка применяется только при ΔF<0, то последовательность F(τ) строго убывает; алгоритм завершается в локальном минимуме относительно выбранного класса перестроек.
2.5. Пояснение вычислительной сложности (что означают O(n2), O(nK), O(n3))
- Без разрежения: полный перебор 2-opt даёт O(n2) кандидатов на один «проход». Если при каждом кандидате пересчитывать F целиком за O(n), получится O(n3) на проход.
- С локальным ΔF: оценка одного кандидата делается за O(1) (константное число рёбер и локальных троек), поэтому полный 2-opt проход O(n2).
- С кандидатами размера K: перебор сокращается до порядка O(nK), а при локальном ΔF один проход становится O(nK). Именно поэтому ограничение степени (например, K≤10) практически значимо и объясняет наблюдаемое масштабирование.
3. Основные результаты
3.1. Экспериментальная постановка
Использованы два класса инстансов:
1. Rand2D_n: точки равномерно на [0,1]2, n∈{100,300,800}.
2. Grid_25x25: решётка 25×25 (625 вершин), как простой прокси «дорожной» структуры.
Базовая стоимость dij — евклидово расстояние. Штраф
- Baseline: Nearest Neighbor + 2-opt, оптимизирующие только D; затем вычисление F при разных λ.
- TurnAware: жадная инициализация по D+λP + turn-aware 2-opt по F с локальным ΔF и разрежением.
В качестве контрольной проверки при λ=0 оба метода должны совпадать по целевой функции, что и наблюдается.
3.2. Результаты (выдержка при λ=1)
Таблица 1 иллюстрирует характерный эффект: TurnAware уменьшает поворотную компоненту P и общую цель F; длина D может умеренно увеличиваться, что соответствует смыслу штрафов поворота.
Таблица 1 - Сравнение Baseline и TurnAware при λ=1,0
Инстанс | n | Fbase | Fturn | ΔF, % | Pbase | Pturn | ΔP, % |
Grid_25x25 | 625 | 2469,1 | 1286,3 | 47,9 | 1823,2 | 396,8 | 78,2 |
Rand2D_100 | 100 | 227,6 | 56,9 | 75,0 | 219,5 | 19,2 | 91,3 |
Rand2D_300 | 300 | 626,2 | 119,5 | 80,9 | 611,3 | 45,7 | 92,5 |
Rand2D_800 | 800 | 1667,9 | 234,8 | 85,9 | 1643,0 | 90,1 | 94,5 |
Примечание: цель F=D+λP
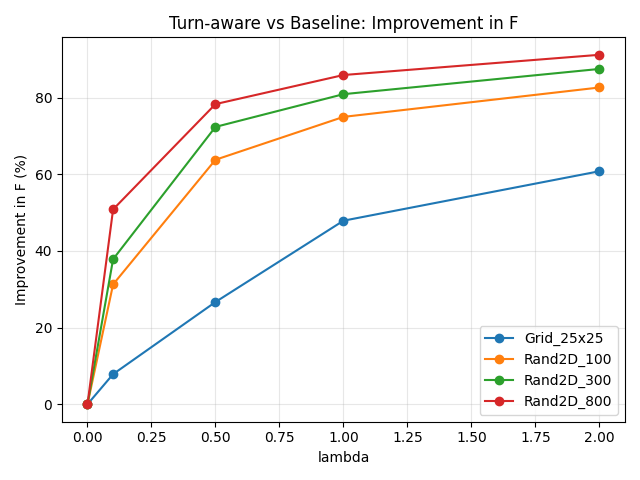
График зависимости эффекта от λ
TurnAware vs Baseline: улучшение по F=D+λP в зависимости от λ на Rand2D и Grid-инстансах.
3.3. Вычислительные затраты
Baseline заметно быстрее, так как оптимизирует только D и использует простой локальный критерий. TurnAware требует дополнительного времени на (i) построение второго порядка и (ii) оценку перестроек по F, однако разрежение и локальный ΔF делают метод практичным на сотнях и тысячах вершин, что согласуется с наблюдениями о масштабировании современных локальных эвристик.
4. Обсуждение
4.1. Интерпретация и практический смысл
Эксперименты показывают:
- При λ=0 методы совпадают (контроль корректности).
- При λ>0 TurnAware резко снижает P и тем самым F.
- Увеличение D при росте λ интерпретируется как компромисс: маршрут становится «плавнее» (меньше резких манёвров), что соответствует прикладным требованиям (время на поворот, безопасность, энергоэффективность).
4.2. Ограничения и минимальные улучшения «до принятия»
- Для редакционной версии желательно добавить 3–5 повторов на каждом инстансе (разные seed) и вывести среднее и стандартное отклонение по F; это недорого по времени, но заметно повышает убедительность.
- Для малых n (например, n≤60) можно решить MILP (или получить нижнюю оценку) и показать относительный разрыв (gap) эвристики; это закрывает вопрос о «точности» без громоздкой экспериментальной части.
5. Заключение
В статье предложена корректная постановка маршрутизации с поворотными штрафами как задачи второго порядка с целью F=D+λP, приведена MILP-модель с линеаризацией троек и разработан масштабируемый эвристический контур: жадная инициализация второго порядка и turn-aware локальный поиск 2-opt/k-opt на кандидатном пространстве с локальным пересчётом ΔF. Минимальная экспериментальная валидация на Rand2D и Grid инстансах демонстрирует существенное улучшение полной цели при λ>0 при приемлемых вычислительных затратах, что согласуется с общими принципами современных TSP-решателей (разрежение соседств, локальные перестройки, инженерия вычислений).